
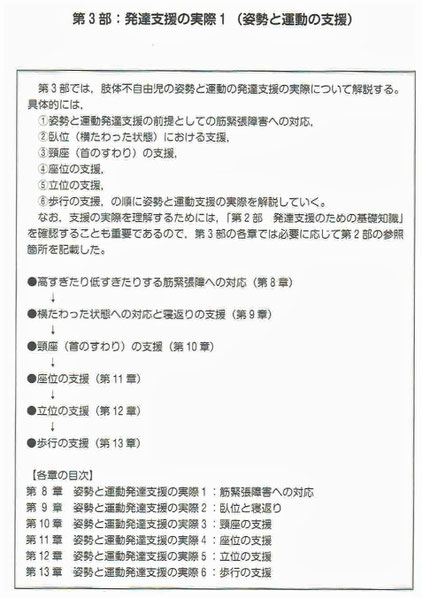
こちらは第3部の全体像です。
画像出展:「脳性まひ児の発達支援」
第8章 姿勢と運動発達支援の実際1:筋緊張障害への対応
第1節 低緊張への対応
●肢体不自由特別支援学校に筋緊張の低い脳性まひ児が在籍していることは珍しくない。

画像出展:「脳性まひ児の発達支援」
1.伸張反射の利用
(1)伸張反射とは
●筋が急速に引き伸ばされたときに筋が一定の長さを保とうとして収縮する。これを伸張反射といい、抗重力筋や顎の筋肉によく発達している。
●伸張反射の反射中枢は脊髄レベルにあるが、同時に脳の上位中枢から抑制を受けて、適当な強さに反射がコントロールされている。そのため錐体路が障害されると抑制がとれコントロールが難しくなって反射が過剰に強く出現するようになる。
●伸張反射とクローヌス(間代)は脳性まひでは痙直型にみられる特徴である。
●伸張反射が亢進しているとクローヌス(間代)がみられる。クローヌスはすべての関節で起こり得るが、臨床的には足関節(足間代)と膝関節(膝間代)でみられやすい。

画像出展:「脳性まひ児の発達支援」
(2)伸張反射を利用して筋緊張を高める
●伸張反射を利用して伸筋の収縮を促通することができる。
画像出展:「脳性まひ児の発達支援」
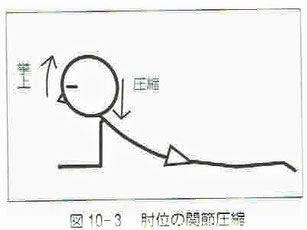
2.関節圧縮の利用
●関節圧縮は固有覚を利用するものである。
●体重あるいは関節を圧縮する身体部位に日常的にかかっている以上の負荷をかける。この方法は圧縮された関節付近の筋群の同時収縮を促通して筋緊張を高める効果がある。これを肩、腰、頭などに用いると関節の近位部の固定性を高める。
●肘位での関節圧縮:両肩から上腕の部分を支持者が保持して両肘を床に向かって垂直に押し込んで肘位を保持する。肘位でこの関節圧縮を行うと、肘と肩の関節の周辺の筋肉が同時収縮して緊張感が高まり、結果的に肢位を安定させると同時に、肩の近位部である首の固定性を高めると考えられる。
●腹臥位で頭の挙上が困難なときに肘位での関節圧縮を利用すると、両肩、両肘、腰を結ぶ三角形の姿勢となり、首を支える体幹・上肢の姿勢が安定して、頭の挙上が容易になる。

画像出展:「脳性まひ児の発達支援」
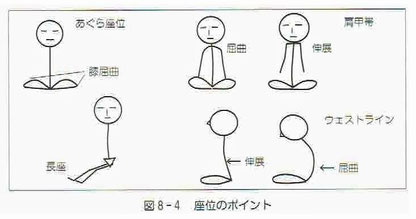
3.キーポイント・オブ・コントロールの利用
●人間の身体は、屈曲や伸展により筋緊張がさまざまに変化する。屈曲や伸展によってある身体のポイントをコントロールすることにより筋緊張を高めたり、低めたりすることができる。このキーポイント・オブ・コントロールはボバース(1980)によって提唱されたものである。
●全身の筋緊張を高めるには股関節及び膝関節を伸展させた姿勢が都合がよい。長座は股関節伸展・膝関節伸展であって下肢の筋緊張が高くなりやすい。
●あぐら座位は股関節と膝関節が屈曲しているので筋緊張を低くする効果がある。
画像出展:「脳性まひ児の発達支援」
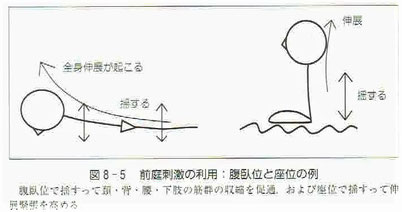
4.前庭刺激の利用
●前庭刺激によって、頚・背・腰部の伸筋収縮を促通することができる。
●「突然、急速、非リズミカル」に入力すると興奮性、つまり筋の収縮を促進する。逆にリズミカルな入力は抑制性、つまり筋を弛緩させる。
●前庭刺激の興奮性入力の具体的な方法を例示すると、腹臥位や座位で上下に揺らす前庭刺激を用いて伸筋収縮の促通を行うやり方が考えられる。(促通とは、ここでは神経や筋などへ刺激を与えて筋の収縮をうながす意味で用いている)
画像出展:「脳性まひ児の発達支援」
第2節 過剰に高い筋緊張への対応
1.関節圧縮の利用
●体重またはそれ以下の力での関節圧縮を使用すると筋緊張を低減する効果がある。これは筋緊張が亢進している関節周囲筋を抑制し、その関節周囲の筋緊張を一時的に低下させる。
2.キーポイント・オブ・コントロールの利用
●肩と肩甲帯を屈曲させるとその付近の筋緊張を低める効果がある。
●ウェストラインの屈曲は背中・腰付近の伸筋緊張を低める効果がある。
●股関節及び膝関節を屈曲させた姿勢が全身の筋緊張を低める。あぐら座位は股関節屈曲・膝関節屈曲であるので下肢の筋緊張は低くなりやすい。
3.前庭刺激の利用
●リズミカルな入力は抑制性として働き筋を弛緩させる。つまり筋緊張を低減させる効果がある。
第9章 姿勢と運動発達支援の実際2:臥位と寝返り
第1節 寝返りの意義
●重度の肢体不自由児では、寝たきりの状態で身体の変形や拘縮や痛みのある子どもが多く見られる。
第2節 仰向け、うつ伏せと寝返り
1.仰向けとうつ伏せの比較
●仰向けは身体を支える面積が狭く、重みが一部に集中するため身体を変形させやすい。そのため仰向けからうつ伏せへ姿勢変換させ、過度の負担を低減する必要がある。
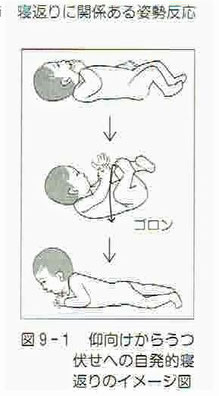
2.仰向けとうつ伏せの間の姿勢変換:寝返り
●自発的寝返りのためには、足を持ち上げて全身をやや屈曲させることが必要である。運動の発達は頭から足の先へと発達していくために、姿勢と運動の発達に遅れがある肢体不自由児では、この足を持ち上げる動きに困難があることが多い。
画像出展:「脳性まひ児の発達支援」
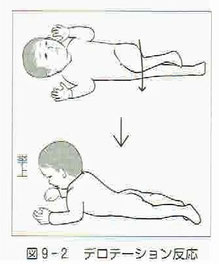
第3節 寝返りに関係ある姿勢反応
●デロテーション反応とは仰臥位の状態で屈曲した左足をクランクとして骨盤を回旋させる。すると体幹が回転して頭が持ち上がった姿勢になる。この反応が現われれば、次に自発的寝返りが出現する。
画像出展:「脳性まひ児の発達支援」
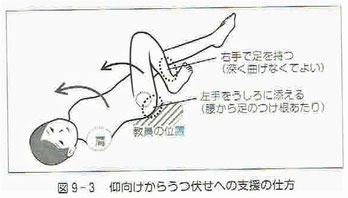
第4節 寝返りの支援の実際
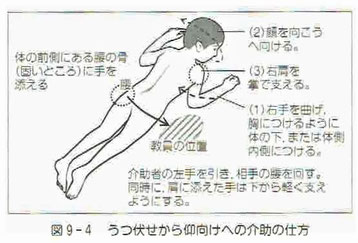
●回転の動きを強くあるいは速く行うと、子ども顔が強く床にぶつかるので、ゆっくりとそっと動かす。
画像出展:「脳性まひ児の発達支援」
●うつ伏せから仰向けへは、腰の骨盤部分を上方に持ち上げるようにして体重を体幹と下肢に分散して回転すると容易に行うことができる。
画像出展:「脳性まひ児の発達支援」
第10章 姿勢と運動発達支援の実際3:頸座の支援
第1節 姿勢と運動発達における頸座の意義
1.頚座の意義
●頚座は姿勢コントロールの第一歩であり、姿勢と運動発達に困難のみられる子どもの姿勢と運動発達支援の第一歩でもある。
2.頚座と姿勢発達の基本姿勢としての腹臥位の意義
●腹臥位は仰臥位とは異なり、伸展がとりやすい。伸展がとりやすい姿勢が重要なのは、肘位・手位・座位・四つ這い位・立位はすべて伸展を特徴とする姿勢だからである。
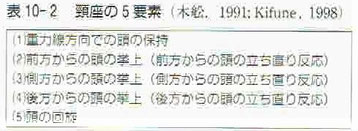
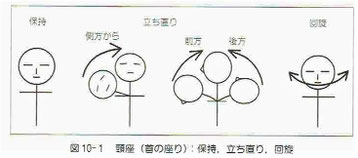
第2節 頚座の定義と要素
●頚座(首の座り)の定義は諸家によって異なっている。
画像出展:「脳性まひ児の発達支援」
画像出展:「脳性まひ児の発達支援」
第3節 脳性まひ児の頸座獲得のための支援の実際
1.ハイガード姿勢
●ハイガード姿勢は、幼児の立位や歩行時にみられる両手を高く上げてバランスをとる姿勢であり、この姿勢は頚筋・背筋を収縮させて伸展姿勢を強化し、抗重力姿勢をとりやすくする。

画像出展:「脳性まひ児の発達支援」
2.肘位と関節圧縮
●腹臥位で頭の挙上をはかるときに、肘位をとらせると、両肩、両肘、腰を結ぶ三角形の姿勢となり、頚を支える体幹・上肢の姿勢が安定して、頭の挙上が容易になる。
画像出展:「脳性まひ児の発達支援」
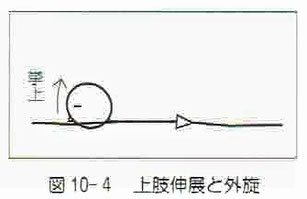
3.上肢の伸展と外旋
●腹臥位で上肢を前・上方に開きぎみに伸展し外旋させると肩・頚あたりの筋が収縮して挙上を促通する。なお、この技法はキーポイント・オブ・コントロールの1つである。
画像出展:「脳性まひ児の発達支援」
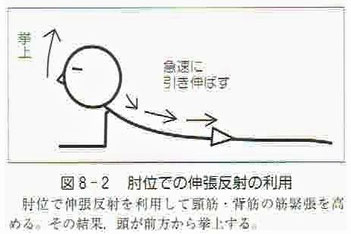
4.頚・背・腰部の伸張による伸張反射
●腰・背・頚あたりの伸筋を急速に引き伸ばすと伸張反射により伸筋の収縮が促通されて、その結果として頭の前方からの挙上が起こりやすくなる。
●伸張反射は肘位とともにかなり効果的な技法であり、肘位とあわせて用いると効果が増す。

画像出展:「脳性まひ児の発達支援」
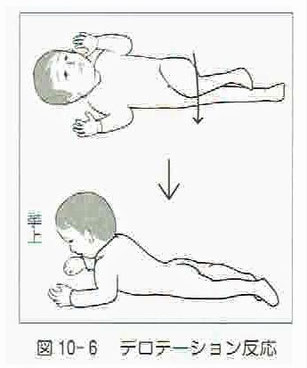
5.デロテーション反応
●デロテーション反応とは仰臥位の状態で屈曲した左足をクランクとして骨盤を回旋させる。すると体幹が回転して頭が持ち上がった姿勢になる。この反応が現われれば、次に自発的寝返りが出現する。
画像出展:「脳性まひ児の発達支援」
6.触覚や振動覚
●軽くすばやい触覚は筋の収縮をうながす。筋腹への振動覚も同様であり、前庭覚と違い、収縮させたい筋だけを刺激できるので頚筋や背筋へ直接刺激する。
第11章 姿勢と運動発達支援の実際4:座位の支援
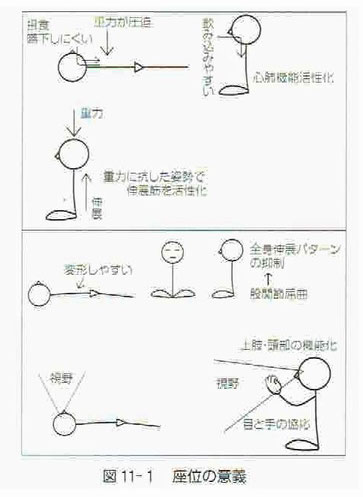
第1節 座位の意義
●座位がとれれば健康の保持と学習面の両方でさまざま効用がある。さらに、人間関係やコミュニケーションといった社会適応や環境適応に関しても有用である。
画像出展:「脳性まひ児の発達支援」
第2節 座位と関係する姿勢反射・反応
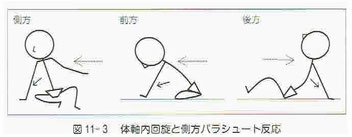
1.座位の傾斜反応とパラシュート反応
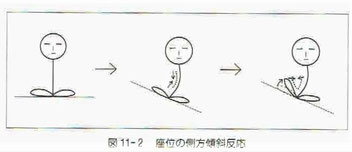
(1)座位の傾斜反応
●座っている床がゆっくりと傾斜したときにバランスを保とうとして、頭・体幹が傾斜方向と反対方向へ立ち直る反応である。
●座位の傾斜反応には3つの特徴がある。
・脊柱がカーブする。
・傾斜と反対側の下肢が挙上。
・傾斜と反対側に頭が傾斜する。
●学校や家庭でできる簡単な支援法
・支援者があぐら座位をとって子どもの腰辺りを両手で支えてだっこした状態(向きは自由)をとる。その状態で左右や前後にゆっくりと小さく傾けてみる。体幹のカーブもしくは頭の立ち直り反応が出ている場合は、このやり方でゆっくりと小さく傾けることをくり返す。目標は体幹のカーブであり、辛抱強く継続することが大事である。
画像出展:「脳性まひ児の発達支援」
(2)パラシュート反応
●座位で大きくあるいは急速に傾いたときに、傾斜反応では対応しきれない場合にパラシュート反応がみられる。
●発達支援の順序として傾斜反応の支援の次に行うとよい。
画像出展:「脳性まひ児の発達支援」
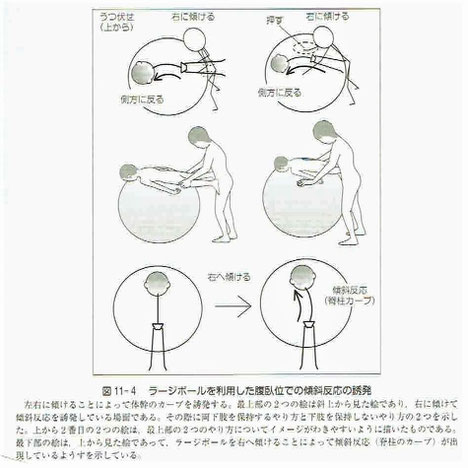
2.座位の傾斜反応の基礎としての腹臥位の傾斜反応
●腹臥位の傾斜反応を誘発することが間接的に座位の傾斜反応を引き出すことにもなる。
●傾斜反応の特徴の1つである体幹のカーブは腹臥位でも座位でも同様である。したがって、ラージボールや傾斜台やその他の多様な教具・遊具を利用して、座位だけでなく腹臥位や他の姿勢での支援の工夫を考えることが大事である。
●ラージボールがない場合は、大きめで硬めのクッションを重ねて使う。
●傾斜反応は頭と重力の方向の感覚によって誘発されることを留意して、頭をいろいろな方向に向けることができる動きや姿勢を工夫してみることが大事である。また、「バランス遊び」として楽しく行うことも大切である。
画像出展:「脳性まひ児の発達支援」
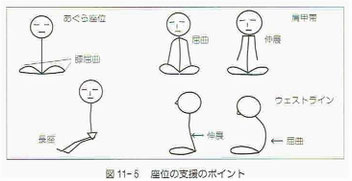
第3節 座位を支援するためのポイント
●座位保持に必要な筋緊張のコントロールには、適切なポイントへの介助が必要になる。
●座位の支援のポイントは用い方によって緊張を高めたり、あるいは緊張を低めたりするので、一人ひとりの緊張状態と支援の目標をあわせて使い分ける必要がある。全身の緊張を高めるには股関節及び膝関節を伸展させた姿勢、たとえば長座がよい。一方、あぐら座位は筋緊張を低くする効果がある。あぐら座位は全身の伸展緊張が高い場合に有用な姿勢である。
画像出展:「脳性まひ児の発達支援」
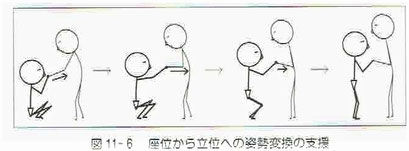
第4節 座位から立位への姿勢変換の支援
●座位の次は立位の獲得だが、立位をとるためには座位から立位への姿勢変換が必要である。
●子どもの立ち上がる力や自発的に立ち上がる意欲を大事にした支援が求められる。
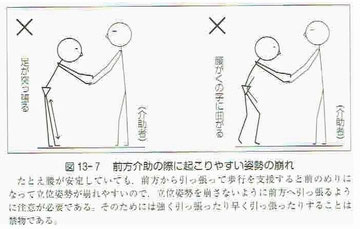
●前から子どもの両手を持って支援するやり方が望ましい。
●前から子どもの両手を持って支援するやり方では、子どもの手の持ち方に注意が必要である。図11-7の持ち方がよい。
画像出展:「脳性まひ児の発達支援」
・前から両手を持って引き上げていく(膝の角度が90度以上まで)。
・下肢の伸展が楽になり立位に移行する。
・下肢の伸展とともに上肢の屈曲を意識すると立ち上がりやすい。

これは子どもが支援者の親指を握る形になっている。握るという行為は子どもの自発的参加を促す。また、握る力や握る意志が少ない場合でも、このやり方であれば介助者がそれを補助することにより安全に支援することができる。
画像出展:「脳性まひ児の発達支援」
第12章 姿勢と運動発達支援の実際5:立位の支援
第1節 立位の特徴
●立位は全身が伸展しているという特徴がある。
●肢体不自由児では屈曲姿勢が多く、立位の支援においては伸展姿勢の保持が重要な課題となることが多い。

画像出展:「脳性まひ児の発達支援」
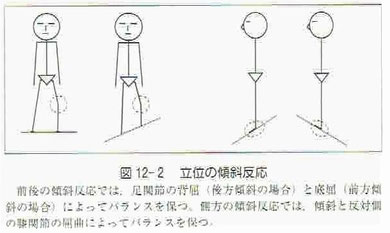
第2節 立位と関係する姿勢反射・反応:傾斜反応
●立位の獲得には立位の傾斜反応を引き出す支援が重要となる。
●立位の傾斜反応は前方と後方では足関節の働きが中心になり、側方では膝関節の働きが中心になる。
●小型トランポリンは子どもが立っている位置を変えないで前後左右の傾斜反応を誘発できるので非常に使いやすく便利な教具である。
画像出展:「脳性まひ児の発達支援」

画像は“mom-ma”さまより拝借しました。
第3節 立位保持と獲得の支援のポイント
●伸展姿勢には全身の伸筋を収縮させる必要がある。背筋、臀部の筋、大腿四頭筋、下腿の筋など。
1.立位保持の支援で大事な身体のキーポイント
●尖足の場合、股関節屈曲、膝関節屈曲で円背になりやすいため、補装靴の使用を検討する。
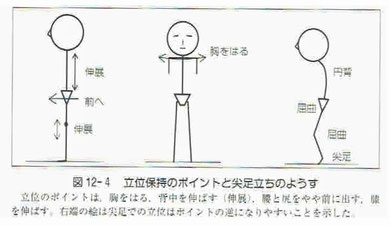
①胸をはる
②背中を伸ばす
③腰と尻をやや前に出す
④膝を伸ばす
画像出展:「脳性まひ児の発達支援」
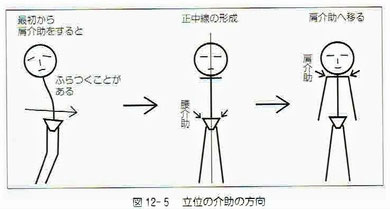
2.立位獲得支援の経過に沿ったキーポイント
●立位獲得のための支援における介助は腰介助から肩介助へという方向が大事である。
画像出展:「脳性まひ児の発達支援」
第5節 歩行の獲得には立位の安定が大事
●歩行は移動することと立位を保つことの2つを同時に行うという複雑な協調を必要とする運動である。
●連続的にバランスを前方に崩していきながら、なおかつバランスを崩さないという2つの矛盾を解決しなければならない。
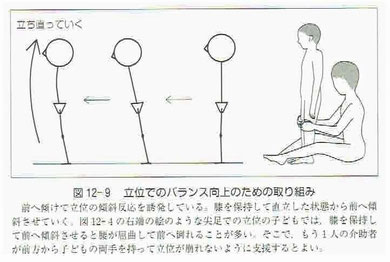
この姿勢を30秒程度行った後で要介助歩行を行なうと、上体のふらつきがやや減ってしかも足が出やすくなることが多い。
画像出展:「脳性まひ児の発達支援」
第13章 姿勢と運動発達支援の実際6:歩行の支援
第1節 歩行の完成
●歩行は中枢神経系の成熟レベル(延髄、橋、中脳、大脳)に依存しており、姿勢反射・反応の成熟過程、つまり原始反射の抑制、立ち直り反応の獲得、平衡反応の獲得が歩行獲得の基礎にある。
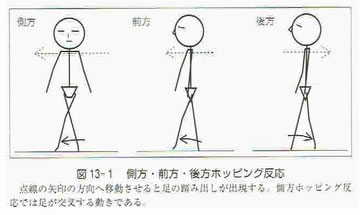
第2節 歩行と関係する姿勢反応:ホッピング反応
●ホッピング反応は立位で重心が移動した際に、足を重心の移動方向へ踏み出す反応である。このホッピング反応は自動的な歩行を可能にするという意味で、姿勢と運動の発達支援では重要な反応である。
画像出展:「脳性まひ児の発達支援」
1.歩行とホッピング反応の関係
●ホッピング反応の有無は歩行を予測するための指標として有用である。ホッピング反応がみられない場合には、つかまり歩行も杖歩行もできないと考えられている。
2.歩行支援におけるホッピング反応誘発の実際
●ホッピング反応は側方ホッピング反応からスタートすべき。
●ホッピングの誘発は肩介助が原則なので、肩介助で立位をとれることが前提になる。

画像出展:「脳性まひ児の発達支援」
第3節 歩行支援のポイント
●支援は後方腰介助→後方肩介助→前方介助→側方介助の順に支援を進めていくことがよい。

画像出展:「脳性まひ児の発達支援」
画像出展:「脳性まひ児の発達支援」
第4節 さまざまな歩行のようすと支援の実際
1.突進様に歩いたり、ふらふらと静止できない場合
●歩行そのものを練習するのではなく、立位で安定して静止できることを目指す。
●最初に立位の姿勢アライメントを整えることが大事である。次に少しずつ前傾させ前方傾斜反応を誘発し全身の伸展が生起され「抗重力身体伸展姿勢」が保ちやすくなる。この状態で抗重力伸展立位姿勢の獲得と立位の静止状態でのバランスの向上をはかることができる。
2.体軸内回旋を活用した歩行
(1)体軸内回旋とは
立ち直り反応の影響を受けて発達する。
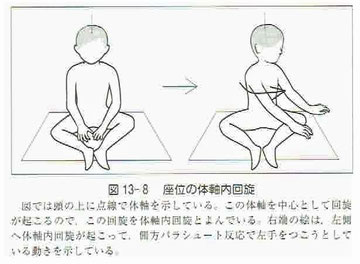
具体的な支援の工夫としては、たとえば座位をとった子どもの前に大好きなおもちゃをいくつか置いて、体軸を回旋させてそのおもちゃをとって遊ぶなどの活動が考えられる。
画像出展:「脳性まひ児の発達支援」
(2)体軸内回旋を用いての歩行介助
●足が出ない場合、体軸内回旋を用いて足を一歩出させて歩行させることができる。

図の右端の絵の状態で、介助者が右手を前方へ軽く引っ張ると、前方ホッピング反応としての右足の移動が出現しやすい。
画像出展:「脳性まひ児の発達支援」