
今回は、第3章 理学療法の実際 Ⅳ.ダイナミック訓練の実際 5.立位・歩行機能訓練 になります。

5.立位・歩行機能訓練
●立位を保持するうえで、必要な条件は以下の4つである。
①股関節の伸展
②膝関節の伸展
③足底荷重
④バランス機能
●筋力学的には、股関節は大殿筋の発達・活性化によって伸展し、膝関節は内側・外側広筋の発達と活性化によって伸展する。
●抗重力的足底支持は、ヒラメ筋の発達と活性化によって可能となる。
●立位訓練は、膝立ち、つかまり立ち、椅坐位獲得までを1つのレベルとし、つかまり立位から四点歩行は、次のレベルと分けて考える。
a.つかまり立ちまで
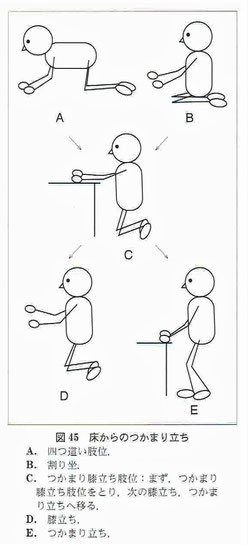
1)膝立ちからのつかまり立位訓練
つかまり両膝立ち
坐位が安定し、四つ這いができるようになると、膝立ち訓練が取り入れられる。正坐出発肢位から(図45-B参照)。両手をテーブルなどで支え、徐々に股関節を伸展位に、さらに膝も90°まで伸展してくる。四つ這い肢位からも、手をテーブルにかけ、つかまり膝立ち肢位になる(図45-A,C参照)。
両膝立ち
つかまり膝立ちが安定すると、徐々に両手は支持として働かず両下肢だけの支持となり、両手支えなしでの膝立ちへ移る(図45-D参照)。
つかまり立ち
膝立ちが安定してくるとテーブルや横バーにつかまり、体重を足底にのせ両下肢起立へ進む(図45-E参照)。両股、両膝を伸展位に伸ばし、両足への支持を増やす。手掌支持立位が望ましい。肩のレトラクション、肘屈曲による引きを起こさないよう、抑制をはかり、つかまり立ちを育てていく。
画像出典:「脳性麻痺と機能訓練」
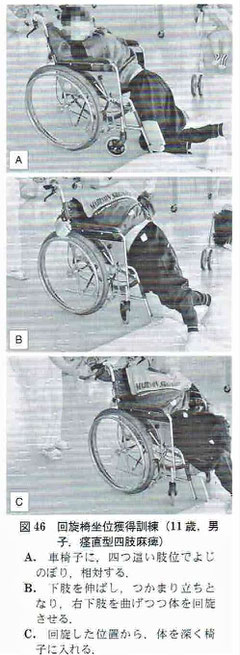
2)つかまり立ちから椅坐位へ(立位回旋訓練)
つかまり立ちからの椅子坐り(車椅子、便器)は、ADL上、最重要なテーマである。この動きでは、相対した椅子に体を180°近く回旋して坐るために、下位体幹から股関節にかけての回旋が必要となる。
患児の前に台を置き、この台を両手でつき、つかまり立ちする。上肢で体を浮かせつつ下部体幹を回旋させ、回旋方向の股関節と膝関節を屈曲させ、殿部を台にのせる。術者は骨盤部を持って下部体幹の回旋を誘導する。台の高さは、低いものから始め、だんだん高くする。四つ這いから横坐りの訓練と基本的には同じである。
ADL訓練では、床から車椅子への移動で訓練することも多い(図46参照)。
画像出典:「脳性麻痺と機能訓練」
3)椅坐位からのつかまり起立訓練
つかまり起立訓練
椅坐位をとり(図47-A参照)、前方にテーブルを置く、両上肢をテーブルに置き、体重をかけつつ、股、膝を伸ばし、股関節の内転・内旋を防ぎつつ、坐骨を空中に浮かす(図47-B,C参照)。
平行棒内起立訓練
平行棒内で椅坐位をとり、両手を平行棒に置き、体全体を浮かせつつ、平行棒内起立訓練を行う。車椅子からの平行棒内起立訓練を行う。車椅子からの平行棒移動などの形でしばしば行われる。
歩行器への起立訓練
歩行器を椅子の前に置き、椅坐位から歩行器への起立訓練を行う。

画像出典:「脳性麻痺と機能訓練」
b.つかまり立位から杖歩行まで
つかまり立ちレベルになると、次は両ロフストランド杖、松葉杖歩行の獲得を目標とする。
対称性二点歩行と交叉性四点歩行の2つに分かれる。
1)対称性歩行(大振歩行、小振歩行)
両手を同時に前に出し、体を支え(図48-A参照)、両下肢を同時に振り出す移動である(図48-B,C参照)。平行棒内移動、歩行器移動、両松葉杖(ロフストランド杖)移動などで急ぐ時にみられる。両下肢の交互移動性がなく、一段レベルが低く、訓練上勧められない。
2)四点歩行
まず、平行棒内で四点歩行を覚え、PCW型歩行器を使った四点歩行に進み、次にロフストランド杖での四点歩行を覚える。
3)立位・歩行訓練の実際
立位訓練
つかまり立ちが可能になった段階で、歩行の準備としての立位訓練に入る。この時点では、上肢の引込み支持と前傾姿勢をとる傾向があり、独歩または杖歩行への準備としての立位に多くの問題をもっている。股関節の十分な抗重力伸展や全足底接地など、骨盤からのコントロールによりアライメントを整えていく。壁での寄りかかり立位、壁などに向きあっての上肢の平面支持立位などは、後方への不安定のためむずかしく、かがみ肢位を強めるので勧められない。上肢の挙上による体幹・股関節の伸展、上肢の外転・外旋による下肢の外転・外旋肢位の賦活をはかりながら、体幹、股関節の伸展、上肢の十分な伸展を教えていき、後方への不安定性を取り除き、全足底接地位での完全な荷重を経験させていく。
下肢の支持性の低下や筋緊張により、SLB(短下肢装具)、LLB(長下肢装具)、P-LLB(骨盤帯付き長下肢装具)、などを装着させることもあるが、これはあくまでも下肢筋の緊張のコントロールの補助として用いる。装具を立位手段として使用してはいけない。
立位姿勢が整ったら、側方、前後への重心移動と、それに伴う体幹の立ち直り、骨盤内および足底内での体重移動、膝のコントロールなどを教えていく。SLBで1分以上の一人立ちが可能となった段階で、歩行訓練へと移行していく。
PCW歩行(図49-A,B参照)
立位が可能になっても、最初から独歩は難しく、一側への重心移動の際、股関節の伸展保持が難しく、体幹は前傾し、アライメントが崩れやすい。後方への安定性をもたらすPCW(postural control walker)を使用して歩行訓練を行う。上肢と体幹の十分な伸展を行いながら、股関節伸展を保持させたうえで、重心移動を伴った一側下肢での支持を骨盤のコントロールにより行い、反張膝や膝折れに注意しながら、踵接地、蹴り出しなどを教えていく。上肢支持をなるべく少なくし、ゆっくりと歩行させる(平行棒は、上肢の引き込み支持が強くなる可能性があるので注意する)
ロフストランド杖歩行(図49-C参照)
PCWでの歩行が安定したらロフストランド杖に移行する。PCWに比べ、上肢支持の安定性が減少するため、後方への重心移動にたいする立ち直りが必要となる。それが困難な時は前傾姿勢を強め、杖の支持面が広くなり、それに伴い下肢の内転・内旋、足部の前・内側支持が著明となる。これを防ぐため、体幹、股関節の伸展位の保持と、上肢の外転・伸展を促しながら、一歩一歩重心移動を確実に行い、歩行させる。小幅に出した杖の位置まで、下肢を振り出せることが望ましく、その振り出した下肢の足から膝へ、膝から股に、十分に荷重したことを確認したうえで反対側を振り出す。四点歩行が安定したら二点歩行に移行する。

画像出典:「脳性麻痺と機能訓練」
c.かがみ肢位歩行
かがみ肢位の矯正と、立位・歩行の獲得には、ここで述べた訓練とともに、各種装具、整形外科手術を合わせた実践が必要となる。
d.直立二脚歩行
患児の前方あるいは後方より、交叉歩行を一部介助し、体重が踵から足底外側支持、さらに足底母趾側に移るパターンを教えていく。荷重時(制動期)に、股関節軽度屈曲、膝関節軽度屈曲、足関節直覚位の肢位が望ましい。
付.矯正したい不良肢位
1)反張膝歩行
膝の伸展緊張が強いか、あるいは尖足と膝の伸展が合併すると、反張膝、股屈曲、尖足位になりやすい。腰椎前弯、股関節屈曲、尖足あるいは外反尖足が一体化した変形であり、どこに主な問題があるいかを観察し、問題の強い部分を治療する。尖足に対しては、装具を用い、直覚位とし、反張を抑制する。尖足矯正術も併用する。股関節屈曲はストレッチで伸ばし、屈筋群解離で直す。大腿直筋の過緊張による反張に対しては、大腿直筋の筋間腱切腱ののち、膝の屈曲位の中で歩行訓練を行う。
2)屈曲肢位歩行
両股、両膝がともに屈曲し、尖足、外反扁平足を合併する肢位である。屈曲膝に対しては、ストレッチとともにダイアルロックを使用した長下肢装具で徐々に伸展する。強引な伸展は関節軟骨を傷つけるので、股関節、膝関節とも屈筋群解離術を併用する。尖足に対しては、幼若期には時間を決めたSLB装用で保存的な矯正をはかる。固定化したものには、腓腹筋解離手術を行ったうえで荷重訓練に入る。
3)外反扁平足
足底アーチサポートで中骨部のアーチを強化し、足底屈筋群の活性化をはかる。立位、歩行の獲得についても、段階を追った取組みで自発性の高いダイナミックな取組みが可能になっている。
付記:整形外科的選択的痙性コントロール手術(OSSCS)
矯正したい不良肢位の“反張膝歩行”および“屈曲肢位歩行”の説明の中には、整形外科手術となる解離手術などが出てきています。個人的には手術の判断は難しいものと想像しますが、そのような選択肢があることは画期的だと思います。詳しく知りたいと思い見つけたのが熊本セントラル病院さまのサイトになります。

『OSSCSは、Orthopaedic Selective Spasticity-control Surgeryの略で、「整形外科的選択的痙性コントロール手術」という手術です。「筋解離術」と言われる手術法の中に分類されます。筋解離というのは、筋肉を切ったり伸ばしたりして緩めることを意味します。』