
今回は、第3章 理学療法の実際 Ⅲ.自発運動誘発訓練 になります。
第3章 理学療法の実際
Ⅲ.自発運動誘発訓練
1.ダイナミック訓練の中心
●人の基本運動機能は大きく、次の5つに分けられる。
①寝返り機能
②這い機能(腹這い)
③坐位機能
④四つ這い機能
⑤立ち、歩き機能
このうちのどこが障害されているかを評価し、その部分を集中的に訓練し、機能を上げる必要がある。
●寝返り訓練と腹這い訓練は、ダイナミズムを伴う動的訓練であり、リハビリテーション医学の真髄ともいえるが、その手技は簡単なようで難しく、誰でも使える賦活手技が要約として示されにくい。
●寝返り訓練と腹這い訓練は、訓練時間内の訓練だけでは効果は少なく、たえず保護者の協力の中で育てていかなければならない。
●寝返り訓練と腹這い訓練は、分かりやすく楽しい遊びとして、日々の生活に取り入れられることを、医師や療法士は保護者に指導する必要がある。
●坐位機能は他動的に坐位をとらせると、静的な抗重力機能ととらえられ、訓練は比較的容易であるが、自分で坐位をとろうとする自発訓練は、患者自ら坐位獲得のための能動的な動きを必要とし、ダイナミズムを伴う訓練となる。
●坐位訓練は、割り坐、正坐、横坐、長坐といったいろいろな坐位を育てる中で、上肢も体の支えから解放され、巧緻性獲得の出発点となる。
●割り坐位は、四つ這い移動への出発点であり、また立位肢位への出発点でもある。したがって、寝返り、腹這いから、次のレベルの機能獲得への起点となる。
●割り坐位で脊柱の伸展能力を育てつつ、さらに割り坐から四つ這い移動を獲得し、股外旋筋の発達を待ちながら、四つ這いから、横坐、あぐら坐、成熟した長坐へと、より安定した坐位へ進む。このように割り坐位からの自立坐位の獲得訓練および四つ這い獲得訓練は、ダイナミズムを伴う動的訓練の3本目の柱である。
●立ち、歩き機能は、直立二脚歩行を行う人類だけがもつ特徴的かつ精緻な機能であり、足部構造を中心に極めて精巧なメカニズムを育てている。
●立ち、歩き機能を獲得するためには、四つ這いまでの知識のうえに、さらに多くの知見が必要であり、それらの蓄積と応用のうえで、初めて歩行は可能となる。
2.正常発達児と脳性麻痺児の運動発達の差
●腹這い移動から、直接、四つ這い肢位に移るのが正常児の発達であるが、これを脳性麻痺児に行おうとすると、レベルが違いすぎて一気に行えない。
●腹這い肢位から側臥位に体を回旋させ、肘つき、手つきで体を起こし、長坐位に到達させることも脳性麻痺児には難しい。
●脳性麻痺児は、腹這いの次に割り坐を発達させ、そこから四つ這い肢位、四つ這い移動に進む。
3.脳性麻痺児特有の運動発達とその評価
a.頭の回旋と持ち上げ
1)側臥位回旋不可
緊張性頚反射など、頚部筋の緊張・麻痺のため、頚の回旋が不可能である。
2)頭部回旋
頚部筋に随意性が出現し、仰臥位および腹臥位で、頭は床に付いたまま左右に回旋する。
3)頭部の持ち上げと回旋
仰臥位および腹臥位で頭を空間に持ち上げ、保持回旋する。
b.寝返りの発達
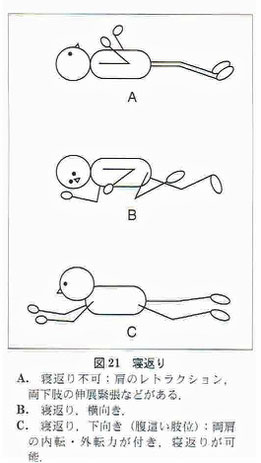
1)寝返り不可(図21-A参照)
緊張性迷路反射などの緊張のため、頭の回旋、肩や股関節の内転・外転、体幹の回旋が得られず、寝返りが不可能である。下肢では伸展緊張が強く、回旋に必要な股関節内転・外転の動きが出にくい。
2)寝返り、横向き(図21-B参照)
肩や股関節の内転による横向きまでの寝返りが可能である。上肢・下肢に内転・外転力がつき、体幹を横向きに保ちうる。
3)寝返り、腹這い肢位まで(図21-C参照)
体幹がさらに回旋し、腹臥位になるレベルであり、体幹を前腕で支えることが可能になる。
画像出典:「脳性麻痺と機能訓練」
上からA、B、C となっています。
c.腹這いの発達
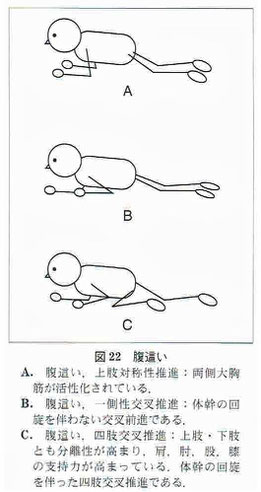
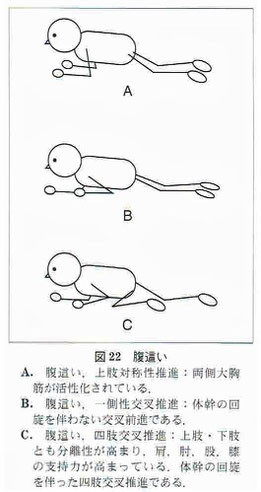
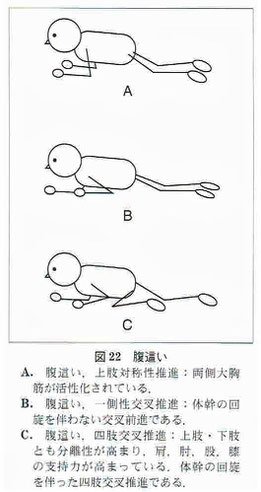
1)腹這い上肢対称性前進(図22-A参照)
原始的な腹這いであり、両上肢を同時に屈曲、さらに同時に伸展して前進する。対称性緊張性頚反射が内在する対称的な移動である。下肢は伸展位で動かないことが多い。両肩のレトラクションがなお強かったり、上肢の支持、推進力が弱く、一側上肢屈伸での推進ができない。両下肢も伸展緊張が強く、屈伸の動きは少なく左右の分離性もない。
画像出典:「脳性麻痺と機能訓練」
図22-Aは上段です。
※対称性緊張性頚反射(STNR)について

画像出典:「トコちゃんベルトの青葉」
『対称性緊張性頸反射(STNR)が残存すると、頸伸展時、肘関節・手関節は伸展し、股関節・膝関節は屈曲する。また頸屈曲時は肘関節・手関節が屈曲し、股関節・膝関節が伸展してしまう』


画像および文章は、”【横浜・白楽】脳とからだセラピストのたわごと” さまより拝借しました。
左の絵は、赤ちゃんが重力に抗って頭を持ち上げた時の状態で、腕が伸びて足が曲がっています。
右の絵は、頭を下げた時に腕が曲がり、お尻が上がった状態です。
●これらの動きはハイハイをする前の段階になり、この反射が出ている間はハイハイができない。
●STNRは生後6~9ヶ月から現れ、9~11ヶ月後には統合されるので、この反射の出現から統合される期間は、他の原始反射に比べるとても短い。
●この反射により、ハイハイや立ち上がりに必要な筋肉の発達を促す。
●頭を上げて遠くを見るようになることから、視覚的な遠近感を獲得できるようになる。
STNRが残存している場合の影響
・ハイハイを十分にできなかったため、両手や両足の協調した動きが苦手
・片側だけの動きになりがち(手書きのとき、反対側の手で紙を押さえないなど)
・頭を前に下げたときに、腕も曲がってしまうため、字を書くときはさらに頭が前に下がる
・イスに座るときはいつも前のめりになる。または足を投げ出すように浅めに座る。
・歩くときは片足、または両足が内側を向く
・頭と目、目と手の協調運動が苦手(マット運動の前方回転、水泳、球技など)
・集中力に欠ける
・首と肩の筋肉が緊張しやすく、首や肩のコリ、偏頭痛になることもある
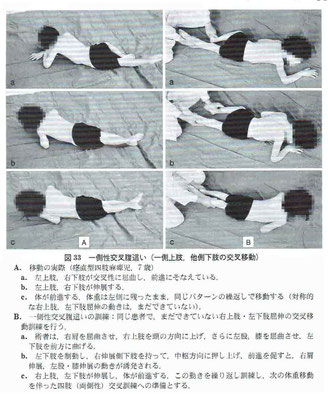
2)一側性交叉腹這い(図22-B参照)
対称性緊張性頚反射が弱まり、上肢に力がつくと、一側上肢の屈曲、伸展による前進が可能になる。同時に、屈曲した上肢の対側下肢が屈曲する交叉状態もみられるようになる。しかし、まだ体幹の上部・下部を分離させる回旋の動きはなく、一側上肢屈曲、他側下肢屈曲の繰り返し移動で前進する(図33-A参照)。
画像出典:「脳性麻痺と機能訓練」
図22-Bは中段です。
画像出典:「脳性麻痺と機能訓練」
図33-Aは左側です。
3)四肢(両側性)交叉腹這い(図22-C参照)
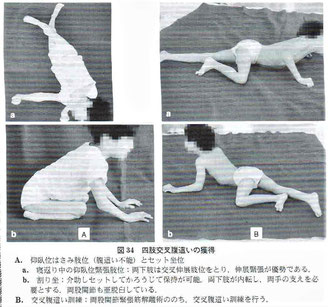
下肢の緊張が弱まり体幹の回旋の動きが出ると伸展側に体重が移動し、両側性に、一側上肢、他側下肢が屈曲・伸展する四肢交叉移動ができるようになる。個々の下肢の屈曲・伸展が容易になり、骨盤の持ち上げが可能となり、自立坐位獲得への準備ができてくる。両上肢に力がつき、肘つき位で交互に動かし、下肢も交叉性に動く、交叉肢位移動が完成する(図34-B参照)。
画像出典:「脳性麻痺と機能訓練」
図22-Cは下段です。
画像出典:「脳性麻痺と機能訓練」
図34-Bは右側です。
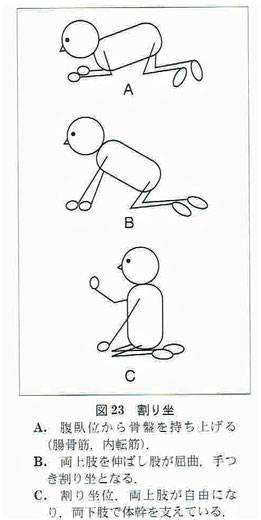
d.坐位の発達
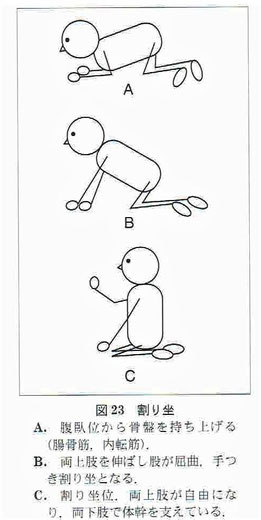
1)手つき割り坐位肢位(図23-B参照)
肘つき腹這い位で、骨盤が持ち上げられるようになると、骨盤を上げつつ股関節を屈曲させ、次に肘を伸ばし、体重を後方に移動させつつ手つき割り坐位肢位をとる。交叉腹這いから、四つ這いレベルへ移るステップである。
画像出典:「脳性麻痺と機能訓練」
図23-Bは中央です。
2)割り坐(図23-C参照)
上肢の支えがいらなくなり、下肢に全体重がかかるようになると、割り坐が可能になる。いろいろな坐位への出発肢位である。下肢と体幹だけの自立坐位であり、腹這いから次の四つ這いへのステップでもある。大腿直筋、内側・外側ハムストリングの緊張がもっともゆるみ、抗重力的な体幹筋、股周囲筋が活動しやすい。
画像出典:「脳性麻痺と機能訓練」
図23-Cは下段です。
e.四つ這いの発達
1)四つ這い肢位(図24-A参照)
割り坐から上肢を前に伸ばし、床につけ、これに体重をのせ、股関節と膝関節を伸ばしていくと、四つ這い肢位になる。四つ這いへの出発肢位である。機能的には、両上肢での手掌支持、両下肢での膝蓋-脛骨粗面部支持が可能になり、体が空間に保持された状態である。両手指、両手関節の支持力を育てる重要な肢位であり、この支持力をもとに両手は巧緻性を獲得する

画像出典:「脳性麻痺と機能訓練」
図24-Aは上段です。
2)対称性四つ這い(バニーホッピング)(図24-B参照)
四つ這いの肢位で、頭と両上肢を伸ばし、体重をかけ、同時に下部体幹と下肢を屈曲させ、振り出し前進する。振り出しの終わりで股関節を伸展させつつ、膝・下腿に体重をかけ、割り坐位に戻る。次に頭と上肢を屈曲させて手を前の方につき、さらに前進する。対称性緊張性頚反射が残存する対称性移動である。バニーホッピングともいわれる。股関節の緊張が残り、両下肢の交互性が悪い。

画像出典:「脳性麻痺と機能訓練」
図24-Bは中央です。
3)交叉四つ這い(図24-C参照)
1つひとつの肢が分離し、十分な荷重性、抗重力性を獲得してくると、三肢支持で一肢だけを動かす四つ這い交叉移動が完成する。四つ這い移動からは、横坐り、長坐り訓練が容易となる。

画像出典:「脳性麻痺と機能訓練」
図24-Cは下段です。
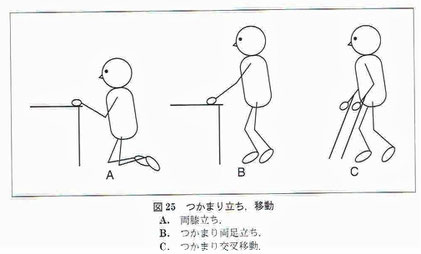
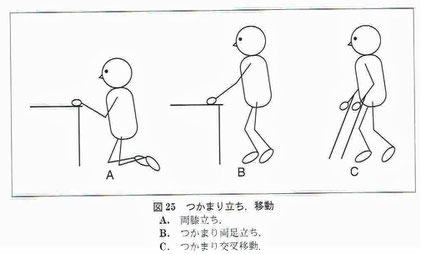
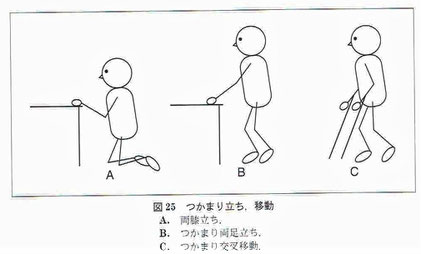
f.立位・歩行の獲得
1)両膝立ち(図25-A参照)
両膝、下腿を使っての二脚立位の原始型である。大腰筋、大腿直筋など、股屈曲の痙性がとれて両膝支えが可能になる。つかまり膝立ちから徐々に手の支えが不用になり、下肢に体重がかかり、膝立ちとなる。
画像出典:「脳性麻痺と機能訓練」
図25-Aは1番左です。
2)つかまり両足立ち(図25-B参照)
つかまり立ちで、両股、両膝屈曲位のことが多い。変則四肢支持である。足底接地の条件が整い、股関節、膝関節の抗重力伸筋が働きはじめて、つかまり立位が可能になる。立位で股・膝・足部の痙性が現われやすく、不安定である。尖足、外反扁平足などが残り、足部の抗重力機構が十分に育たず、立位保持ができない。
画像出典:「脳性麻痺と機能訓練」
図25-Bは中央です。
3)つかまり交叉移動(図25-C参照)
変則四点交叉移動である。両下肢に十分体重がかかり足底支持ができるようになると、両杖でバランスをとり、歩行を開始する。足底支持が容易となって、初めて杖による四点移動が可能になる。
画像出典:「脳性麻痺と機能訓練」
図25-Cは右端です。
4.直立二脚歩行
二脚立位で、しばしば初期的には、両尖足、両股、両膝屈曲位をとることが多い(かがみ肢位)。大殿筋、大腿四頭筋、ヒラメ筋が活性化してくるとともに、下肢が伸展し、直立位となる。足底がつき、足底外側縁で体重を支えるようになると、二脚歩行が可能となる。