
今回は、第3章 理学療法の実際 Ⅳ.ダイナミック訓練の実際 4.四つ這い機能訓練 になります。

Ⅳ.ダイナミック訓練の実際
4.四つ這い機能訓練
●四つ這い機能は、這い機能の1つであるが、体幹を空間に保持して移動させるという高次の抗重力性をもつ。
●どのように、この高い抗重力機能をもった交叉移動を獲得させるかが課題となる。
a.四つ這い肢位訓練
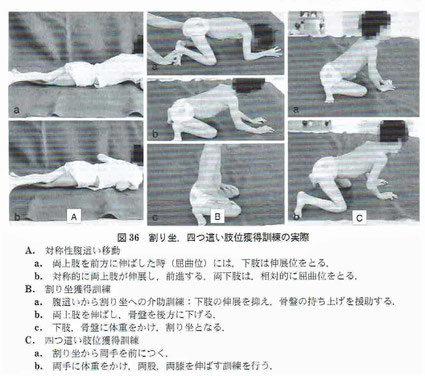
●四つ這い移動が可能となるのには、その前に両手掌と両膝つきでの四つ這い肢位の保持能力を獲得する必要がある。
●割り坐位が実用化してくると、次に両手掌への体重をかける訓練に入り、骨盤を浮かし、膝、足に体重をかける段階になる。
1)割り坐からの賦活
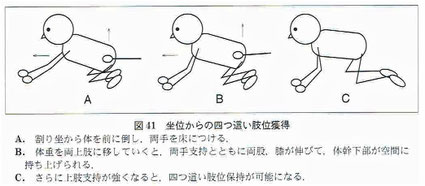
割り坐の中から上肢支持が、もっとも実用的である。両上肢を床につけ、両手で割り坐位をとる。骨盤を持ち上げつつ(図41-A参照)、上肢に体重をかけ、骨盤を浮かせ下肢を少しずつ伸展させ、下肢屈曲位で四つ這い肢位をとる(図41-B参照)。体重を前方に移動しつつ、股、膝を90~100°屈曲とし、両上肢の支持力を高める(図41-C参照)。股関節は90°以上屈曲位に保持し、下肢に十分の荷重をかけると、手掌の支持力が弱い上肢でも四つ這い肢位がとれる。股や膝に伸展緊張があると、体重が下肢にかからず、上肢にかかるので体重を支えきれず、四つ這い移動に移れない。下肢の屈曲位中間肢位での支持能力を育てる必要がある(図36-C参照)。
画像出典:「脳性麻痺と機能訓練」
画像出典:「脳性麻痺と機能訓練」
b.対称性四つ這い訓練(バニーホッピング)
●四つ這い肢位が安定してくると、四肢を使って移動訓練を開始する。
●両上肢に体重をかけ、下肢を屈曲し前に移動させ屈曲した下肢で体を支え、手つき割り坐をとる。さらに両上肢をこのまま前方に伸ばし、四つ這い位になり、次に下肢を前方へ移動させる。四つ這い肢位と手つき割り坐位を使いながら、対称的な上肢、下肢の動きを利用して前進する。
1)上肢からの賦活(上肢の力が弱い場合)
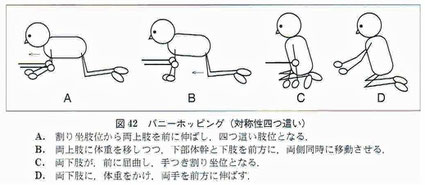
四つ這い肢位をとり、術者は患児の前に相対して坐る。両上肢を前方に伸ばさせ、肘を伸展位に術者の手で保ち、手掌を床につけ、荷重をかける(図42-A参照)。肘を伸展位に保持しつつ、肩を伸展させ体幹を前方(頭の方)にゆっくり引く(図42-B参照)。全体重が両上肢にかかり、下肢が屈曲し、前方に振り出されて手つき割り坐位になる(図42-C参照)。下肢に体重をかけ、手を前に伸ばさせる(図42-D参照)。
画像出典:「脳性麻痺と機能訓練」
2)下肢からの賦活(下肢が伸展パターンをとりやすい時)
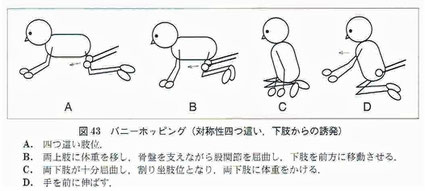
術者は患児の足の方に位置する。初発肢位の四つ這い肢位をとる(図43-A参照)。四つ這い肢位が安定してくると、次は両上肢に体重を少しずつのせつつ骨盤を少し持ち上げ、両上肢の支持力をさらに強化する。さらに、両上肢と術者の手で体を支えさせながら股関節を屈曲させ(図43-B参照)、下肢を前方に移動させる。屈曲した両下肢に体重をかけ、割り坐または膝立ち位にし、両下肢に体重をかける(図43-C参照)。両上肢を前方に移動させ(図43-D参照)、両手掌を床につける。続いて上肢に体重をかけ、初発肢位に帰る。
画像出典:「脳性麻痺と機能訓練」
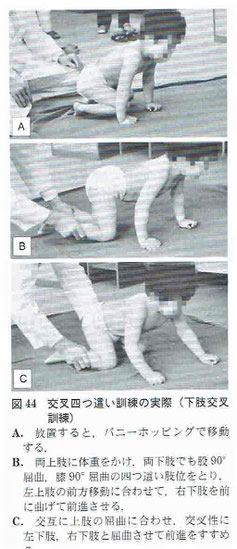
c.交叉四つ這い訓練
●手掌支え、膝支えの力がついてきて、対称性四つ這いができると、交叉移動パターンを用いた四つ這いに入る。
●四つ這いの特徴は3肢で体重を支持し、1肢を前進させるという点にある。
●手技的には腹這い交叉に用いられた一側上肢、他側下肢交叉推進(一側性交叉推進)のパターンを活用し、交叉移動を活性化する。
1)下肢からの訓練
下肢の分離の悪い子どもに使われることが多い。ます、初発四つ這い肢位をとる。術者は患児の後ろに四つ這いとなり、両手で両下肢、大腿部を持つ、両上肢は分離していることが多い。まず、左上肢を前に出させ(屈曲)、続いて右下肢、股、膝を前方に屈曲させる(図44-B参照)。屈曲した左上肢、右上肢にゆっくり体重をかけながら体を前方に移動させ、右上肢、続いて左下肢を前方に屈曲させる(図44-C参照)。屈曲した右上肢、左下肢に体重をのせつつ、体を前方に移動させる。右上肢屈曲・左下肢屈曲、左上肢屈曲・右下肢屈曲というパターンを患者とともに覚え、訓練を進める。一歩一歩の前進のさいに下肢の伸展緊張を抑えつつ、下肢の前方屈曲を容易にするだけでよい。
画像出典:「脳性麻痺と機能訓練」
d.交叉四つ這いと横坐り(正坐、あぐら坐り、長坐り)訓練
●交叉四つ這い移動では、大殿筋の股関節伸展、外旋力が育てられ、体幹と両股関節の可動域が増し、内外旋のうごきが拡がる。
●両膝つき肢位で、股関節を中心に体は右に左に回旋が可能になる。
①まず、四つ這い中間位をとる(図39-A参照)。
②一側下肢を深く屈曲させる。
③屈曲させた下肢側の方に、股関節を屈曲させ、骨盤を降ろしていく(図39-B参照)。
④殿部が下腿の外側に付き、横坐りになる。一側は内旋位、他側は外旋位となる
⑤外旋側に十分体をかけ、支持訓練をする。
⑥体幹と股関節の回旋能力をさらに伸ばし、内旋側下肢を浮かし外旋させ、あぐら坐を促す。
⑦さらに、ハムストリングの緊張をゆるめ、長坐りへと誘導する(図39-C参照)。
股関節の回旋は、つかまり立ちから大きく体を回旋させて椅坐位または車椅子に移る時に重要な動きであり、このレベルでの横坐り訓練で十分訓練の必要がある。

画像出典:「脳性麻痺と機能訓練」
e.四つ這い移動を阻害する典型的脳性麻痺パターンとその抑制
1)手掌支え不能状態
片麻痺児では、四つ這いが困難で、正常移動パターンができない。肩のレトラクション、肘の固縮、手関節変形の3つが手掌支えを困難にしている。四肢麻痺でも、両上肢にこれらの問題が存在する。レトラクションを抑え、肘を伸ばし、手掌支えの訓練を行う。肩、肘、手関節のストレッチにより緊張をゆるめたのちに自発訓練を行う。
2)痙直型両麻痺四肢麻痺の下肢伸展変形
両麻痺児では、股関節伸展緊張と膝関節伸展緊張の2つが問題となり、四つ這い肢位がとれにくい。四つ這い訓練を行い、伸展パターンが支障となる場合、受動的伸張訓練、伸筋群解離術で痙縮を除去し、股関節と膝関節の90°屈曲位保持をはかる(図36-B,C参照)。
四つ這い機能獲得の留意点は、次の2点である。
①股関節が90°まで自分で曲げられるかどうか。
②左右の下肢の交互性が出ているか。

画像出典:「脳性麻痺と機能訓練」
【療育メモ15】“四つ這いの獲得は科学的知識を結集して”
『四つ這いは抗重力性の高い移動形態である。したがって、寝返り、腹這いのレベルから一気に四つ這い状態までもってくることはむずかしい。寝返り機能を育て、対称性腹這い、腹這い交叉移動を育て、さらに割り坐位機能を高め、下肢の支持性が十分高まった時点で、四つ這い支持に入る。さらに対称性四つ這いを獲得し、そして、次に対称性緊張を弱め、下肢の交互性を出し、さらに、一側上肢、他側下肢同時屈伸の交叉推進パターンを習得させ、初めて四つ這い交叉移動が可能になる。上肢の支持を得るための上肢の条件づくりも必要である。肩のレトラクション、肘の屈曲緊張、手関節の変形もコントロールしなくてはならない。また、力の弱い上肢に無用の負担がかかっては、四つ這いはできない。下肢のほうに十分体重がかかるように、屈曲位が得られる条件もつくらなければならない。また、交叉推進パターンの学習も重要である。
四つ這い移動はこれらの問題を1つひとつ根気よく解いていって、初めて獲得できるもので、一気にしようとするには無理がある。』
付記:“這い這い動作の再考”
這い這いができるようになることが当面の課題である患者さまと向き合っています。何か有益な情報がないか探していたところ、長崎大学さまの卒業論文集に関する資料が検索されました。タイトルをクリック頂くとPDF7枚の資料がダウンロードされます。

要旨
『乳幼児の這い這い動作のみについての先行研究は、個人差が大きいなどの理由から非常に少な く、その内容も這い這い時の姿勢や重心などに着目した研究が多くを占めている。そこで本研究では這い這い動作を理解するため、這い這い動作(crawling:ずり這い、creeping:四つ這い)の動きのバリ エーション数に着目して調査を行った。対象は協力を得られた乳幼児19 名(月齢 5~18 ヶ月)とした。複数の床条件において乳幼児の這い這い動作をビデオカメラで撮影し、動作のバリエーション数をカ ウントした。その結果、這い這い歴に従ってバリエーション数は増加し、その後減少した。また、調査の結果と先行研究から、乳幼児の這い這い動作においても、運動学習の過程で無作為な動作から合理的な動作を獲得するという、バリエーション数の増減を繰り返していると仮説を立てるに至った。』